Update on 2023-03-07 for version 4.26
From firmware version 4.x, BACRouter has builtin Modbus gateway functionality. This article will try to explain the underlying mechanism.
Modbus Read
BACRouter will periodically read point’s value and cache it. “Update interval” defines how often BACRouter update the value.
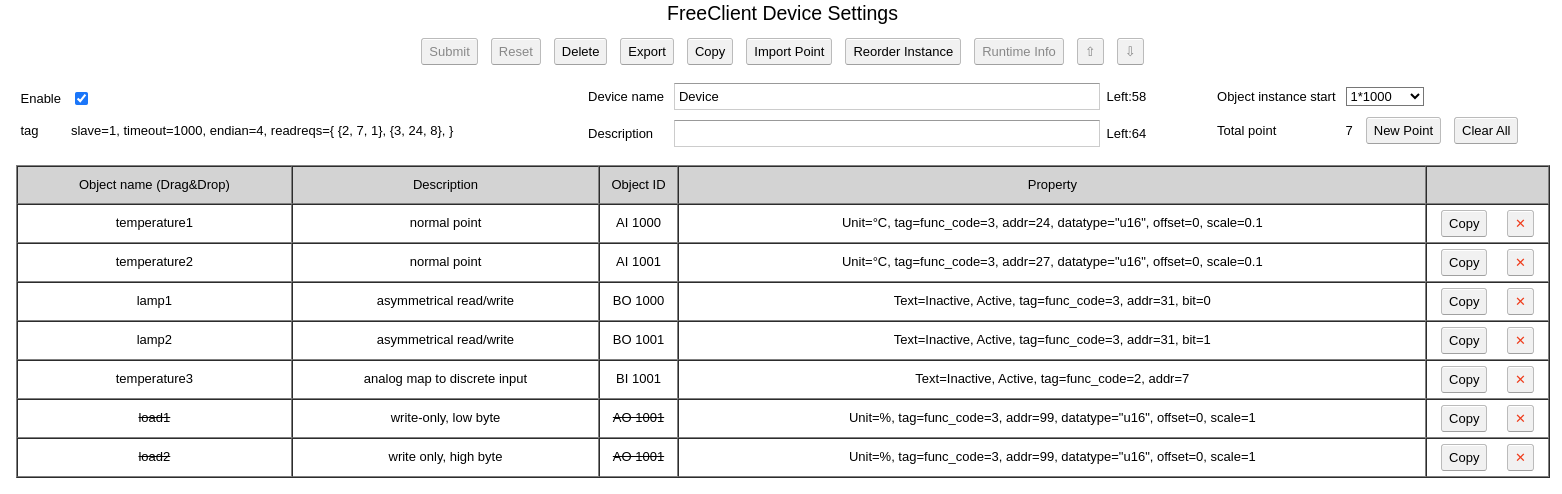
To improve performance, BACRouter will read as more as possible data in one transcation. In Modbus standard, at most 2000 bits (coil or discrete) or 125 registers (input or holding register) could be read in one request, but specific Modbus slave device may only support a lower value. In BACRouter’s WebUI, there is a Modbus parameter edit dialog in “Slave Settings”, “Multiply read bits” and “Multiply read registers” parameters define the ability of the slave device.
BACRouter will not segment reading of single point even the “Multiply read registers” is less than registers used by the point.
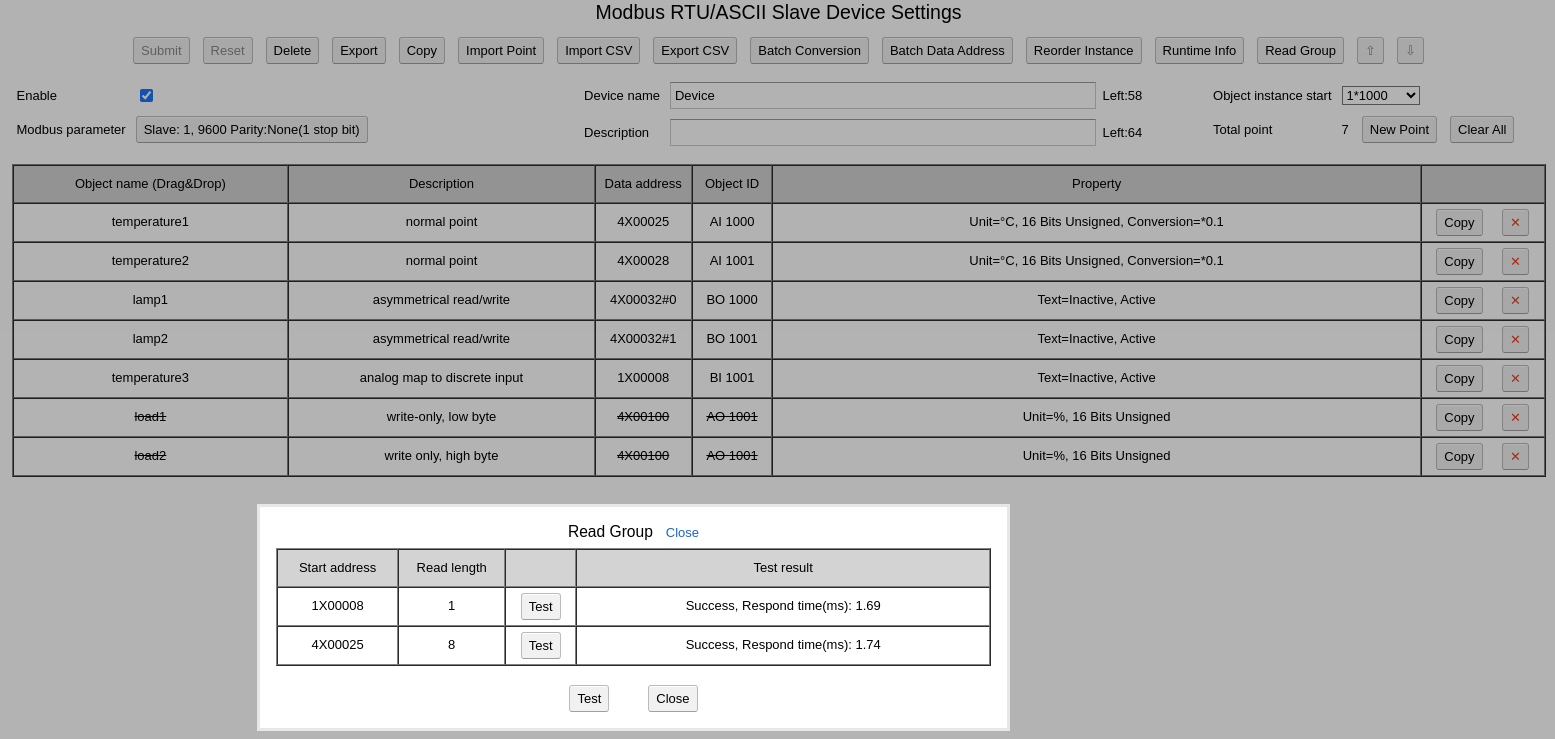
Usually the data we care for has discontinuous Modbus address, for example, We only care for coils on address 1 and 2000, though we could read coil data from address 1 to 2000 in one request and skip returned data from address 2 to 1999, sending two requests independently for coil on address 1 and coil on address 2000 maybe more efficient. “Bits skipped” and “Registers skipped” parameter define how many unused data units between 2 cared data units are allowed to be skipped. As previous example, if “Bits skipped” is set to 1998, the BACRouter will try to read coil 1 and 2000 in single request. If “Bits skipped” is set to 1997, then BACRouter will read Coil 1 first, then Coil 2000, because bits skipped is 1998 and is greater than the setting of 1997.
On the WebUI page for slave, the “Read Group” button will show how the BACRouter will group the reading and test it. User should pay special attention on server exception of “Illegal data address”.
Modbus Write
BACRouter will not combine multiple writing demand into one writing request. It always queue write request immediately after receiving command.
For writing single data unit, there are two Modbus function codes available. For example, function code 5 is writing single coil, function code 15 is writing multiple coils but the quantity of coil to write could be assigned to 1. Some devices only support one of them. “Coil write singly” parameter will specify which function code is used.
In the same way, “Register write singly” is applied to register writing. If any BACnet output object maps to multiple holding registers, it implies the slave device support function code 16 for write multiple registers, “Register write singly” will be automatically disabled, function code 16 will be used for writing any register.
Offline
If any read/write request failed, BACRouter will retry it, when the continuous fail count reachs 3, BACRouter will regard the slave device as offline. In offline state, BACRouter will retry the request every “Offline update interval”.
The BACnet side reaction for offline event will be described later.
Modbus Serial Bus
BACRouter supports serial slave devices with different baudrate, parity, RTU/ASCII mode on same RS485 bus. Before sending request, BACRouter will change it serial port parameter based on slave device’s settings.
It should be safe to have 2 devices with same slave address but different baudrate or RTU/ASCII mode, but preventing collision based on different parity might not be enough, because some devices do not examine parity error.
Single Device Mapping Mode
If VBUS network port is not enabled, BACRouter will work in single device mapping mode, every Modbus slave device will be mapped into exclusive object instance space of 1000 in the only BACnet device defined in “Application Settings”.
The actual BACnet object name will be organized as “master_name|slave_name|object_name”, The “|” is name delimiter which could be selected from dozen of characters by user.
As recommended by standard, BACRouter will create one StructuredView object for each slave device.
When the slave device turn to offline in this mode, all points’ reliability will be set to “COMMUNICATION_FAILURE”, if slave device is back to online, upon updating of point value, the point’s reliability will be set back to “NO_FAULT_DETECTED”.
Virtual Device Mapping Mode
If VBUS network port is enabled. Each slave device will be mapped to a virtual BACnet device on VBUS network. The MAC address will start from 1.
In this mode, each slave shall has a unique “Device instance”. The BACnet device name of the slave will be “master_name|slave_name”, The delimiter “|” is select-able.
When the slave device turn to offline in this mode, as recommended by standard, the virtual BACnet device will stop sending/receiving any packet to simulate offline state. if slave device is back to online, after updating all point’s value, the virtual BACnet device will quite offline state.
Slave Device’s Status
For every slave device, BACRouter will create 3 objects in gateway device, one object is Binary_Input with name of “online”, which represents online/offline status of slave device. another object is Analog_Input with name of “update_delay”, which is recently average update time delayed over “”Update interval”, the last one is Analog_Input with name of “fail_rate”, which count a relative long time fail rate on Modbus side.
Those objects’ name have prefix of “master_name|slave_name|comm|”, where “|” is select-able delimiter.
Object Instance Assignment
Object Instance is defined for every object. When the editor dialog for a object is submitted and the object is enabled, the object instance claimed by the object will be assigned, if that assigning fail, a automatically selected instance will be used.
Value Object
AV/BV/MV is behaving same as AI/BI/MI, except that when AV/BV/MV is mapped to writable Modbus address (0X or 4X), the present value of the object is writable, the writing will be forwarded to Modbus side (See below 2 exceptions).
Exception 1: If AV is mapped to holding register, its data type is customized, but the binding script doesn’t support output, that AV will be read only.
Exception 2: If AV is mapped to multiple holding registers, but the”Register write singly” option is enabled, that implies output will not be supported, so the AV will be read only.
Output Object
The value of output object is still being polled from Modbus side and set to object’s Relinguish_Default property. If the value read back does not match last value written, BACRouter will set the reliability of that object to “UNRELIABLE_OTHER”, and BACRouter will queue another write after a certain time. When “Tolerate unmatch” option is enabled, If the value read back does not match last value written, the reliability of that object keeps unchanged, and BACRouter will re-write the value on “Offline update interval”. (Update for v4.34)
Because of above verifying mechanism, the BACRouter will prevent defining two output objects with overlaping Modbus writable address.
NaN For Float And Double
NaN is a special value defined by IEEE-754, BACRouter does not accept NaN (Infinite is still valid for BACRouter).
When a point is defined as Float and Double, but NaN is read from slave, BACRouter will set the reliability to “UNRELIABLE_OTHER”.
Unsupported value for script
When a analog object is customized, but the Modbus to BACnet conversion reports unsupported value from the script, that object’s reliability will be set to “UNRELIABLE_OTHER”.
For a Analog Output object, when the BACnet to Modbus conversion reports unsupported value from the script, the object’s reliability will be set to “PROCESS_ERROR”
For a Analog Value object, when the BACnet to Modbus conversion reports unsupported value from the script, that output attempt will be dropped, the object’s reliability will be unchanged.